
從OpenCV2.4開始,加入了新的類FaceRecognizer,我們可使用它便捷地進(jìn)行人臉辨認(rèn)實(shí)驗(yàn)。其源代碼可以在OpenCV中的opencvmodulescontribdocfacerecsrc下找到。
目前支持的算法有:
Eigenfaces特點(diǎn)臉createEigenFaceRecognizer()
Fisherfaces createFisherFaceRecognizer()
Local Binary Patterns Histograms局部2值直方圖 createLBPHFaceRecognizer()
自動(dòng)人臉辨認(rèn)就是如何從1幅圖象中提取成心義的特點(diǎn),把它們放入1種有用的表示方式,然后對他們進(jìn)行1些分類。
特點(diǎn)臉方法描寫了1個(gè)全面的方法來辨認(rèn)人臉:臉部圖象是1個(gè)點(diǎn),這個(gè)點(diǎn)是從高維圖象空間找到它在低維空間的表示,這樣分類變得很簡單。低維子空間低維是使用主元分析(Principal Component Analysis,PCA)找到的,它可以找具有最大方差的那個(gè)軸。雖然這樣的轉(zhuǎn)換是從最好重建角度斟酌的,但是他沒有把標(biāo)簽問題斟酌進(jìn)去。想象1個(gè)情況,如果變化是基于外部來源,比如光照。軸的最大方差不1定包括任何有鑒別性的信息,因此此時(shí)的分類是不可能的。因此,1個(gè)使用線性鑒別(Linear Discriminant Analysis,LDA)的特定類投影方法被提出來解決人臉辨認(rèn)問題。其中1個(gè)基本的想法就是,使類內(nèi)方差最小的同時(shí),使類外方差最大。
最近幾年來,各種局部特點(diǎn)提取方法出現(xiàn)。為了不輸入的圖象的高維數(shù)據(jù),僅僅使用的局部特點(diǎn)描寫圖象的方法被提出,提取的特點(diǎn)(很有希望的)對局部遮擋、光照變化、小樣本等情況更強(qiáng)健。有關(guān)局部特點(diǎn)提取的方法有蓋伯小波(Gabor Waelets),離散傅立葉變換(Discrete Cosinus Transform,DCT),局部2值模式(Local Binary Patterns,LBP)。使用甚么方法來提取時(shí)域空間的局部特點(diǎn)照舊是1個(gè)開放性的研究問題,由于空間信息是潛伏有用的信息。
由于Eigenfaces和Fisherfaces兩種方法當(dāng)引入新的人臉數(shù)據(jù)時(shí)需要重新進(jìn)行訓(xùn)練,所以這里我側(cè)重介紹LBP特點(diǎn)的有關(guān)內(nèi)容。
Eigenfaces和Fisherfaces使用整體方法來進(jìn)行人臉辨認(rèn)[gm:直接使用所有的像素]。你把你的數(shù)據(jù)當(dāng)作圖象空間的高維向量。我們都知道高維數(shù)據(jù)是糟的,所以1個(gè)低維子空間被肯定,對信息保存可能很好。Eigenfaces是最大化總的散度,這樣可能致使,當(dāng)方差由外部條件產(chǎn)生時(shí),最大方差的主成份不合適用來分類。所以為使用1些鑒別分析,我們使用了LDA方法來優(yōu)化。Fisherfaces方法可以很好的運(yùn)作,最少在我們假定的模型的有限情況下。
現(xiàn)實(shí)生活是不完善的。你沒法保證在你的圖象中光照條件是完善的,或說1個(gè)人的10張照片。所以,如果每人僅僅只有1張照片呢?我們的子空間的協(xié)方差估計(jì)方法可能完全毛病,所以辨認(rèn)也可能毛病。
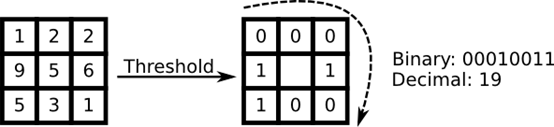
1些研究專注于圖象局部特點(diǎn)的提取。主張是我們不把全部圖象看成1個(gè)高維向量,僅僅用局部特點(diǎn)來描寫1個(gè)物體。通過這類方式提取特點(diǎn),你將取得1個(gè)低維隱式。1個(gè)好主張!但是你很快發(fā)現(xiàn)這類圖象表示方法不單單遭受光照變化。你想一想圖象中的尺度變化、形變、旋轉(zhuǎn)―我們的局部表示方式最少對這些情況比較穩(wěn)健。正如SIFT,LBP方法在2D紋理分析及第足輕重。LBP的基本思想是對圖象的像素和它局部周圍像素進(jìn)行對照后的結(jié)果進(jìn)行求和。把這個(gè)像素作為中心,對相鄰像素進(jìn)行閾值比較。如果中心像素的亮度大于等于他的相鄰像素,把他標(biāo)記為1,否則標(biāo)記為0。你會用2進(jìn)制數(shù)字來表示每一個(gè)像素,比如11001111。因此,由于周圍相鄰8個(gè)像素,你終究可能獲得2^8個(gè)可能組合,被稱為局部2值模式,有時(shí)被稱為LBP碼。第1個(gè)在文獻(xiàn)中描寫的LBP算籽實(shí)際使用的是3*3的鄰域。
1個(gè)更加正式的LBP操作可以被定義為:
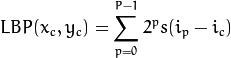
其中(xc,yc)是中心像素,亮度是ic;而in是相鄰像素的亮度。s是1個(gè)符號函數(shù)。
這類描寫方法使得你可以很好的捕捉到圖象中的細(xì)節(jié)。實(shí)際上,研究者們可以用它在紋理分類上得到最早進(jìn)的水平。正如剛才描寫的方法被提出后,固定的近鄰區(qū)域?qū)Τ叨茸兓木幋a失效。所以,使用1個(gè)變量的擴(kuò)大方法是使用可變半徑的圓對近鄰像素進(jìn)行編碼,這樣可以捕捉到以下的近鄰:
對1個(gè)給定的點(diǎn)(xc,yc),他的近鄰點(diǎn)(xp,yp),p∈P可以由以下計(jì)算:
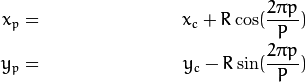
其中,R是圓的半徑,而P是樣本點(diǎn)的個(gè)數(shù)。
這個(gè)操作是對原始LBP算子的擴(kuò)大,所以有時(shí)被稱為擴(kuò)大LBP(又稱為圓形LBP)。如果1個(gè)在圓上的點(diǎn)不在圖象坐標(biāo)上,我們使用他的內(nèi)插點(diǎn)。計(jì)算機(jī)科學(xué)有1堆聰明的插值方法,而OpenCV使用雙線性插值。

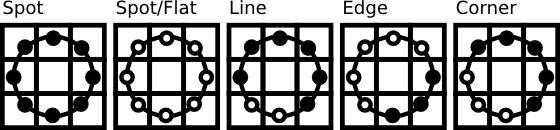
LBP算子,對灰度的單調(diào)變化很穩(wěn)健。我們可以看得手工改變后的圖象的LBP圖象。

那末剩下來的就是如何合并空間信息用于人臉辨認(rèn)模型。對LBP圖象成m個(gè)塊,每一個(gè)塊提取直方圖。通過連接局部特直方圖(而不是合并)然后就可以得到空間增強(qiáng)的特點(diǎn)向量。這些直方圖被稱為局部2值模式直方圖。
class LBPH : public FaceRecognizer
{
private:
int _grid_x;
int _grid_y;
int _radius;
int _neighbors;
double _threshold;
vector<Mat> _histograms;
Mat _labels;
// Computes a LBPH model with images in src and
// corresponding labels in labels, possibly preserving
// old model data.
void train(InputArrayOfArrays src, InputArray labels, bool preserveData);
public:
using FaceRecognizer::save;
using FaceRecognizer::load;
// Initializes this LBPH Model. The current implementation is rather fixed
// as it uses the Extended Local Binary Patterns per default.
//
// radius, neighbors are used in the local binary patterns creation.
// grid_x, grid_y control the grid size of the spatial histograms.
LBPH(int radius_=1, int neighbors_=8,
int gridx=8, int gridy=8,
double threshold = DBL_MAX) :
_grid_x(gridx),
_grid_y(gridy),
_radius(radius_),
_neighbors(neighbors_),
_threshold(threshold) {}
// Initializes and computes this LBPH Model. The current implementation is
// rather fixed as it uses the Extended Local Binary Patterns per default.
//
// (radius=1), (neighbors=8) are used in the local binary patterns creation.
// (grid_x=8), (grid_y=8) controls the grid size of the spatial histograms.
LBPH(InputArrayOfArrays src,
InputArray labels,
int radius_=1, int neighbors_=8,
int gridx=8, int gridy=8,
double threshold = DBL_MAX) :
_grid_x(gridx),
_grid_y(gridy),
_radius(radius_),
_neighbors(neighbors_),
_threshold(threshold) {
train(src, labels);
}
~LBPH() { }
// Computes a LBPH model with images in src and
// corresponding labels in labels.
void train(InputArrayOfArrays src, InputArray labels);
// Updates this LBPH model with images in src and
// corresponding labels in labels.
void update(InputArrayOfArrays src, InputArray labels);
// Predicts the label of a query image in src.
int predict(InputArray src) const;
// Predicts the label and confidence for a given sample.
void predict(InputArray _src, int &label, double &dist) const;
// See FaceRecognizer::load.
void load(const FileStorage& fs);
// See FaceRecognizer::save.
void save(FileStorage& fs) const;
// Getter functions.
int neighbors() const { return _neighbors; }
int radius() const { return _radius; }
int grid_x() const { return _grid_x; }
int grid_y() const { return _grid_y; }
AlgorithmInfo* info() const;
};//聲明
Ptr<FaceRecognizer> createLBPHFaceRecognizer(int radius=1, int neighbors=8, int grid_x=8, int grid_y=8, double threshold=DBL_MAX);
//定義
Ptr<FaceRecognizer> createLBPHFaceRecognizer(int radius, int neighbors,
int grid_x, int grid_y, double threshold)
{
return new LBPH(radius, neighbors, grid_x, grid_y, threshold);
}參數(shù)說明:
* radius :該參數(shù)用于構(gòu)建圓LBP特點(diǎn)。
* neighbors :該參數(shù)是構(gòu)建圓LBP特點(diǎn)所需要的近鄰像素的個(gè)數(shù),經(jīng)常使用是8個(gè)采樣點(diǎn)。采樣點(diǎn)越多,計(jì)算代價(jià)越大。
* grid_x : 該參數(shù)是水平方向上劃分的格子塊個(gè)數(shù),常規(guī)是8個(gè)。區(qū)塊越多,終究構(gòu)建結(jié)果的特點(diǎn)向量的維度越高。
* grid_y : 該參數(shù)是垂直方向上劃分的格子塊個(gè)數(shù),常規(guī)是8個(gè)。
* threshold : 該閾值用于預(yù)測。如果最近鄰的距離大于該閾值,預(yù)測的方法返回⑴。
下面給出了LBPH訓(xùn)練函數(shù)train的源碼,再進(jìn)行分析。
void LBPH::train(InputArrayOfArrays _in_src, InputArray _in_labels, bool preserveData) {
if(_in_src.kind() != _InputArray::STD_VECTOR_MAT && _in_src.kind() != _InputArray::STD_VECTOR_VECTOR) {
string error_message = "The images are expected as InputArray::STD_VECTOR_MAT (a std::vector<Mat>) or _InputArray::STD_VECTOR_VECTOR (a std::vector< vector<...> >).";
CV_Error(CV_StsBadArg, error_message);
}
if(_in_src.total() == 0) {
string error_message = format("Empty training data was given. You'll need more than one sample to learn a model.");
CV_Error(CV_StsUnsupportedFormat, error_message);
} else if(_in_labels.getMat().type() != CV_32SC1) {
string error_message = format("Labels must be given as integer (CV_32SC1). Expected %d, but was %d.", CV_32SC1, _in_labels.type());
CV_Error(CV_StsUnsupportedFormat, error_message);
}
// get the vector of matrices
vector<Mat> src;
_in_src.getMatVector(src);
// get the label matrix
Mat labels = _in_labels.getMat();
// check if data is well- aligned
if(labels.total() != src.size()) {
string error_message = format("The number of samples (src) must equal the number of labels (labels). Was len(samples)=%d, len(labels)=%d.", src.size(), _labels.total());
CV_Error(CV_StsBadArg, error_message);
}
// if this model should be trained without preserving old data, delete old model data
if(!preserveData) {
_labels.release();
_histograms.clear();
}
// append labels to _labels matrix
for(size_t labelIdx = 0; labelIdx < labels.total(); labelIdx++) {
_labels.push_back(labels.at<int>((int)labelIdx));
}
// store the spatial histograms of the original data
for(size_t sampleIdx = 0; sampleIdx < src.size(); sampleIdx++) {
// calculate lbp image
Mat lbp_image = elbp(src[sampleIdx], _radius, _neighbors);
// get spatial histogram from this lbp image
Mat p = spatial_histogram(
lbp_image, /* lbp_image */
static_cast<int>(std::pow(2.0, static_cast<double>(_neighbors))), /* number of possible patterns */
_grid_x, /* grid size x */
_grid_y, /* grid size y */
true);
// add to templates
_histograms.push_back(p);
}
}訓(xùn)練進(jìn)程分為以下幾個(gè)進(jìn)程:
- 首先進(jìn)行必要的毛病檢查,得到人臉圖象向量和標(biāo)簽向量
- 計(jì)算lbp圖象
- 根據(jù)lbp圖象得到空間直方圖
- 將空間直方圖矩陣納入到私有變量_histograms向量中
生成lbp空間直方圖的進(jìn)程:
* elbp函數(shù)用于生成lbp圖象。
* spatial_histogram函數(shù)用于將lbp圖象分塊,對每個(gè)區(qū)塊進(jìn)行直方圖統(tǒng)計(jì)。
下面給出了LBPH預(yù)測函數(shù)predict的源碼,再進(jìn)行分析。
void LBPH::predict(InputArray _src, int &minClass, double &minDist) const {
if(_histograms.empty()) {
// throw error if no data (or simply return ⑴?)
string error_message = "This LBPH model is not computed yet. Did you call the train method?";
CV_Error(CV_StsBadArg, error_message);
}
Mat src = _src.getMat();
// get the spatial histogram from input image
Mat lbp_image = elbp(src, _radius, _neighbors);
Mat query = spatial_histogram(
lbp_image, /* lbp_image */
static_cast<int>(std::pow(2.0, static_cast<double>(_neighbors))), /* number of possible patterns */
_grid_x, /* grid size x */
_grid_y, /* grid size y */
true /* normed histograms */);
// find 1-nearest neighbor
minDist = DBL_MAX;
minClass = -1;
for(int sampleIdx = 0; sampleIdx < _histograms.size(); sampleIdx++) {
double dist = compareHist(_histograms[sampleIdx], query, CV_COMP_CHISQR);
if((dist < minDist) && (dist < _threshold)) {
minDist = dist;
minClass = _labels.at<int>(sampleIdx);
}
}
}預(yù)測進(jìn)程就比較簡單了,首先將待查詢點(diǎn)圖象進(jìn)行l(wèi)bp編碼并生成空間直方圖,然后線性暴力的計(jì)算直方圖的距離,終究輸出距離最小的預(yù)測種別。
compareHist函數(shù)
通過cv::compareHist函數(shù)來評估兩個(gè)直方圖有多么不同、或多么類似,返回丈量距離。
類似度衡量的辦法目前支持4種:
程序員人生,我編程,我富裕,記住wfuyu網(wǎng),php教程,php學(xué)習(xí),php手冊,CMS模版制作
聲明:本站大部分內(nèi)容是作者原創(chuàng),少部分收集于互聯(lián)網(wǎng)供大家一起學(xué)習(xí),原版權(quán)很多不明,如有侵權(quán)請聯(lián)系本站,謝謝!
粵ICP備14040726號-1?? 2015-2020 程序員人生 版權(quán)所有


