
Rosenblatt感知器
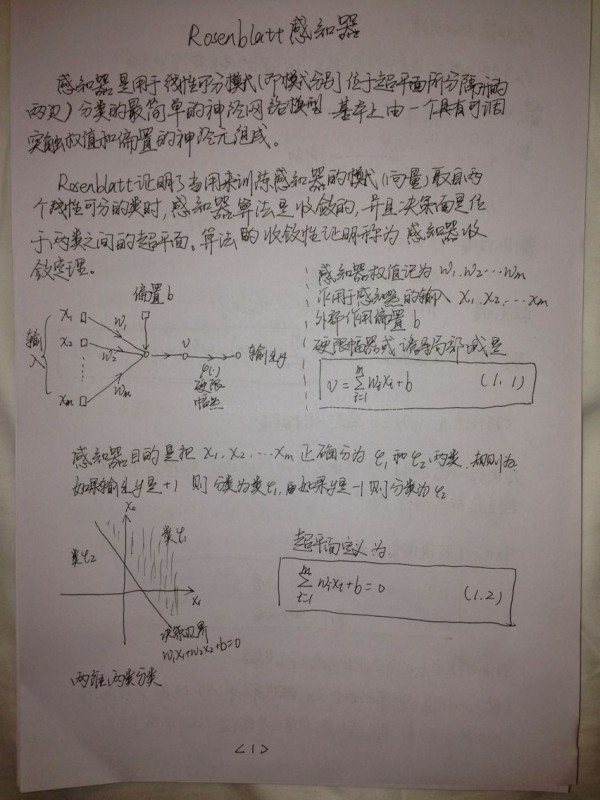
感知器是用于線性可分模式(模式分別位于超平面兩邊)分類的最簡單的神經網絡模型,基本上由1個具有可調突觸權值和偏置的神經元組成。
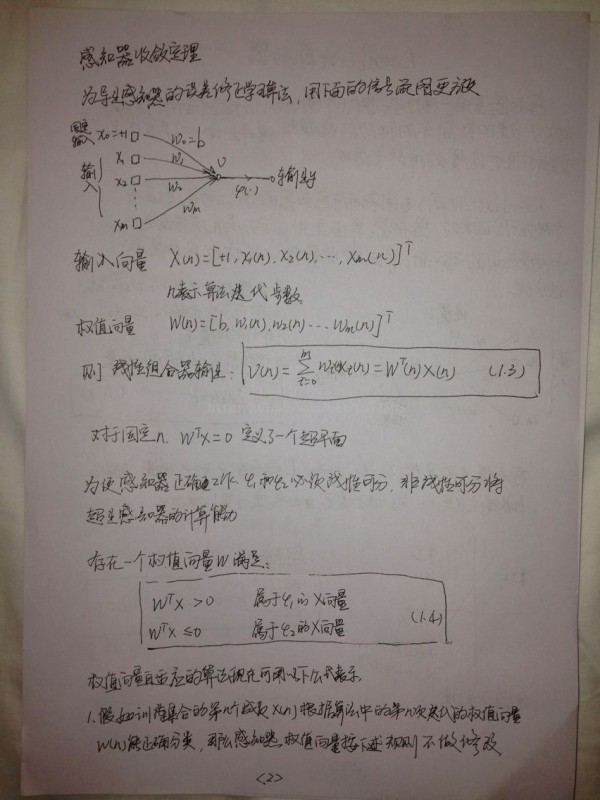
Rosenblatt證明了當用來訓練感知器的模式(向量)取自兩個線性可分的類時,感知器算法是收斂的,并且決策面是位于兩類之間的超平面。算法的收斂性稱為感知器收斂定理。
上一篇 VC++信息安全編程(13)Windows2000/xp/vista/7磁盤扇區讀寫技術
下一篇 java.lang.IllegalStateException: File has been moved - cannot be read again
程序員人生,我編程,我富裕,記住wfuyu網,php教程,php學習,php手冊,CMS模版制作
聲明:本站大部分內容是作者原創,少部分收集于互聯網供大家一起學習,原版權很多不明,如有侵權請聯系本站,謝謝!
粵ICP備14040726號-1?? 2015-2020 程序員人生 版權所有


